Introduction
Robots can look very different from one another.
A robot arm in a factory does not look like a robot vacuum at home. A humanoid robot does not look like a drone. A warehouse robot does not look like a surgical robot.
But behind these different shapes, most robots are built from a similar set of basic parts.
A robot is not just a machine with motors. It is a system that can sense the world, process information, and take action. Some robots are simple and follow fixed instructions. Others use advanced software and AI to deal with changing situations.
In this guide, we will look at the main components of a robot in simple terms.
Quick Answer
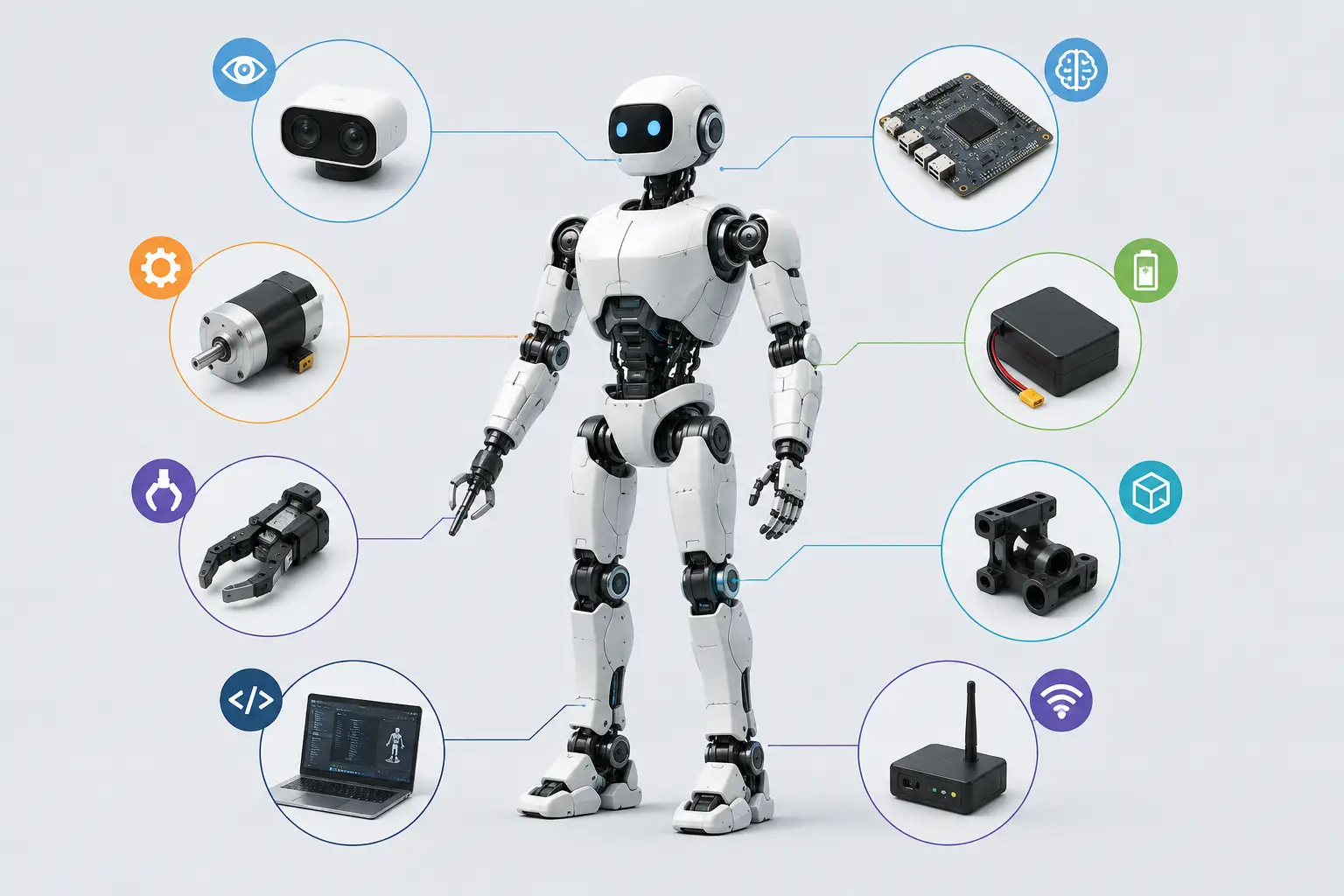
The main components of a robot are:
- Sensors
- Actuators
- Controllers
- Power supply
- Mechanical structure
- End effectors
- Software
- Communication system
- AI or decision-making system
A simple way to understand this is:
Sensors help a robot sense the world.
Controllers help it process information.
Actuators help it move.
Software tells it what to do.
When these parts work together, the robot can perform useful tasks.
1. Sensors
Sensors help a robot understand what is happening around it.
You can think of sensors as the robot’s eyes, ears, and skin. Without sensors, a robot would not know where it is, what is near it, or whether something has changed in its environment.
For example, a robot vacuum uses sensors to detect walls, furniture, stairs, and dirty areas on the floor. A self-driving vehicle uses cameras, radar, and LiDAR to understand the road. A robotic arm may use force sensors to know how strongly it is holding an object.
Common robot sensors include:
- Cameras
- LiDAR
- Ultrasonic sensors
- Infrared sensors
- Touch sensors
- Force sensors
- Gyroscopes
- IMUs
- Microphones
- Temperature sensors
Different robots need different sensors.
A drone needs sensors to stay balanced in the air. A warehouse robot needs sensors to avoid people and shelves. A medical robot may need very precise sensors to support delicate movements.
In short, sensors give a robot information about the world.
2. Actuators
Actuators are the parts that make a robot move.
If sensors are like a robot’s senses, actuators are like its muscles. They turn energy into motion.
Whenever a robot turns a wheel, moves an arm, opens a gripper, bends a joint, or rotates a camera, an actuator is usually involved.
The most common type of actuator is the electric motor. Motors are used in robot arms, mobile robots, drones, humanoid robots, and many other systems.
Common types of actuators include:
- Electric motors
- Servo motors
- Stepper motors
- Hydraulic actuators
- Pneumatic actuators
- Linear actuators
Each type has its own use.
Electric motors are common because they are flexible and easy to control. Hydraulic actuators can provide a lot of power, so they are often used in heavy machines. Pneumatic actuators use compressed air and are often found in factory automation.
A robot cannot do much without actuators. It may be able to “think” or “see,” but it cannot physically act without movement.
3. Controllers
The controller is one of the most important parts of a robot.
It receives data from the sensors, processes that data, and sends commands to the actuators. In simple words, the controller helps the robot decide what to do next.
For example, imagine a robot vacuum moving across a room. When its sensor detects a wall, the controller receives that signal. Then it tells the motors to slow down, turn, or move in another direction.
Controllers can be simple or complex.
A small robot toy may use a small microcontroller. An industrial robot may use a powerful control unit. A humanoid robot may use several computers to control balance, vision, movement, and decision-making at the same time.
Common controller types include:
- Microcontrollers
- Single-board computers
- Industrial controllers
- Embedded systems
- Robot control units
It is important to know that a controller is not always the same as AI.
Many robots do not use advanced artificial intelligence. They may simply follow rules written by engineers. But even in those cases, the controller is still needed to run the robot.
4. Power Supply
Every robot needs energy.
The power supply gives the robot the energy it needs to run its sensors, controllers, motors, computers, and other systems.
Some robots use batteries. Some are connected directly to a power source. Some special robots may use fuel cells or other energy systems.
Common power sources include:
- Batteries
- Wired power
- Charging docks
- Power management systems
- Fuel cells in special cases
Mobile robots usually need batteries because they move around. Robot vacuums, drones, warehouse robots, and humanoid robots all depend heavily on battery performance.
Industrial robot arms are often fixed in one place, so they may be connected directly to power.
Power is not just about making the robot turn on. It also affects how long the robot can work, how heavy it is, how fast it can move, and how much force it can produce.
This is why battery life is such a big challenge for many advanced robots, especially humanoid robots and drones.
5. Mechanical Structure
The mechanical structure is the robot’s body.
It includes the frame, joints, arms, legs, wheels, gears, chassis, and other physical parts that give the robot its shape.
A robot’s structure depends on what it is designed to do.
A robotic arm needs joints and links so it can move in different directions. A four-legged robot needs legs and a strong balance system. A drone needs a light frame and propellers. A warehouse robot needs a stable base and wheels.
Common mechanical parts include:
- Frames
- Joints
- Arms
- Wheels
- Legs
- Gears
- Links
- Chassis
- Shells
Good mechanical design makes a robot stronger, safer, and more efficient.
For example, a robot used in a factory may need a strong metal structure because it carries heavy objects. A home robot may need a smaller and safer body because it works near people. A humanoid robot needs a body that can support balance, walking, and arm movement at the same time.
The mechanical structure is not just about appearance. It decides what the robot can physically do.
6. End Effectors
An end effector is the part of a robot that directly interacts with the outside world.
For a robot arm, the end effector is usually attached at the end of the arm. It can be a gripper, a suction cup, a welding tool, a cutting tool, or even a robotic hand.
You can think of the end effector as the robot’s hand or tool.
Common end effectors include:
- Grippers
- Suction cups
- Welding tools
- Cutting tools
- Drills
- Sprayers
- Surgical tools
- Robotic hands
Different tasks need different end effectors.
A warehouse robot may use a suction cup to pick up boxes. A factory robot may use a welding tool to work on a car body. A surgical robot may use a tiny precision tool. A humanoid robot may use a robotic hand to pick up everyday objects.
End effectors are very important because they decide how a robot touches, holds, moves, or changes objects.
A robot arm without the right end effector is like a person without the right tool for the job.
7. Software
Software is what makes the robot useful.
The hardware gives the robot a body, but software tells the robot what to do with that body.
Robot software can control movement, read sensor data, plan paths, avoid obstacles, recognize objects, and communicate with users.
Common types of robot software include:
- Motion control software
- Navigation software
- Computer vision software
- Task planning software
- Safety software
- User interfaces
- Robot operating systems
For example, a delivery robot needs software to plan a route. A robotic arm needs software to move smoothly and accurately. A drone needs software to stay stable in the air. A robot vacuum needs software to map a room and remember which areas it has cleaned.
Many robotics developers use frameworks such as ROS, which stands for Robot Operating System. ROS is not exactly an operating system like Windows or macOS. It is more like a set of tools that helps developers build robot software faster.
For beginners, the key idea is simple:
Software is the set of instructions and logic that guides the robot’s behavior.
8. Communication System
Robots often need to send and receive information.
A communication system allows a robot to connect with users, computers, cloud platforms, other robots, or factory systems.
For example, a robot vacuum can connect to a mobile app through Wi-Fi. A warehouse robot may share location data with other robots. An industrial robot may receive commands from a factory control system.
Common communication methods include:
- Wi-Fi
- Bluetooth
- Ethernet
- 5G
- Industrial networks
- Cloud connections
- Robot-to-robot communication
Communication is especially important when many robots work together.
In a warehouse, dozens or even hundreds of mobile robots may need to move around at the same time. They need to know where other robots are, where goods are stored, and which tasks should be done next.
Without communication, robots can still work, but they are much less connected and much harder to manage.
9. AI and Decision-Making Systems
Not every robot needs AI.
This is a common misunderstanding. Many robots work very well without advanced artificial intelligence. A traditional industrial robot can repeat the same movement thousands of times with high precision, even if it does not “understand” the world like a human.
But AI is becoming more important in modern robotics.
AI can help robots recognize objects, understand speech, learn from data, make decisions, and adapt to new environments.
AI-related robot capabilities include:
- Computer vision
- Object recognition
- Natural language understanding
- Machine learning
- Path planning
- Decision-making
- Reinforcement learning
For example, a traditional robot may only pick up an object from a fixed position. But an AI-powered robot may be able to find the object in a messy room, understand what it is, and decide how to pick it up.
This is especially important for humanoid robots, home robots, and service robots, because they often work in places that are not perfectly controlled.
A factory can be designed around a robot. A home cannot.
That is one reason why AI is so important for the next generation of robots.
How Robot Components Work Together
Robot components do not work alone. They work as a system.
Let’s use a robot vacuum as a simple example.
The sensors detect walls, furniture, and open space. The controller processes this information. The software plans the cleaning path. The motors move the wheels. The battery provides power. The communication system connects the robot to a mobile app.
All these parts work together to complete one simple task: cleaning the floor.
Now think about a robotic arm in a factory.
The sensors may detect the position of an object. The controller calculates how the arm should move. The actuators move each joint. The end effector grips or tools the object. The software controls timing, speed, and safety.
This is why a robot is best understood as a complete system, not just a collection of parts.
If one part fails, the whole robot may not work correctly.
A Simple Human Body Analogy
One easy way to understand robot components is to compare them with the human body.
| Robot Component | Similar to Human Body | Main Function |
|---|---|---|
| Sensors | Eyes, ears, skin | Sense the environment |
| Controller | Brain | Process information |
| Actuators | Muscles | Create movement |
| Power supply | Energy source | Provide power |
| Mechanical structure | Skeleton | Support the body |
| End effector | Hands or tools | Interact with objects |
| Software | Instructions and memory | Guide behavior |
| Communication system | Speech and signals | Send and receive information |
| AI system | Learning and decision-making | Adapt to new situations |
This comparison is not perfect, but it is useful for beginners.
A robot needs a body, senses, movement, energy, and instructions. More advanced robots also need learning and decision-making abilities.
FAQ
What is the most important component of a robot?
There is no single most important component. A robot is a system, so sensors, controllers, actuators, power, software, and mechanical parts all matter.
However, sensors, controllers, and actuators are often considered the core parts because they allow a robot to sense, process, and act.
Do all robots need sensors?
Most modern robots use sensors, but not every robot needs advanced sensors.
Some simple machines can follow fixed instructions without much sensing. However, robots that work in changing environments usually need sensors to operate safely and effectively.
Is AI required for a robot?
No, AI is not required for all robots.
Many industrial robots work by following programmed instructions. They can be very useful without using advanced AI. However, AI is becoming more common in robots that need to understand images, language, objects, or unpredictable environments.
What part makes a robot move?
Actuators make a robot move.
Motors are the most common type of actuator. They can move wheels, joints, arms, grippers, and many other robot parts.
What is the difference between a controller and software?
A controller is the hardware that processes information and sends commands.
Software is the program or logic that tells the controller what to do.
A simple way to say it is: the controller runs the instructions, and the software provides the instructions.
What are robot arms made of?
Robot arms usually include joints, links, motors, sensors, controllers, and end effectors.
The joints and links form the arm structure. The motors move the arm. The sensors provide feedback. The controller and software decide how the arm should move. The end effector performs the actual task, such as gripping, welding, or cutting.
Conclusion
Robots may look very different, but most of them are built from the same basic types of components.
Sensors help a robot understand the world. Actuators help it move. Controllers and software help it process information and follow instructions. The mechanical structure gives it a body. The power supply gives it energy. End effectors allow it to interact with objects. Communication systems help it connect with people and other machines.
AI is not required for every robot, but it is becoming more important as robots move from controlled factory settings into homes, hospitals, warehouses, and public spaces.
Once you understand these basic components, it becomes much easier to understand different types of robots, from industrial arms and robot vacuums to drones and humanoid robots.