引言
机器人之间的外形可能差别很大。
工厂里的机械臂不像家里的扫地机器人。人形机器人不像无人机。仓储机器人也不像手术机器人。
但在这些不同外形背后,大多数机器人都由一组相似的基础部件构成。
机器人不只是带电机的机器。它是一个能够感知世界、处理信息并采取行动的系统。有些机器人很简单,只会按照固定指令运行;有些机器人则使用更先进的软件和AI来应对变化的场景。
这篇指南会用简单的话说明机器人的主要组成部分。
快速回答
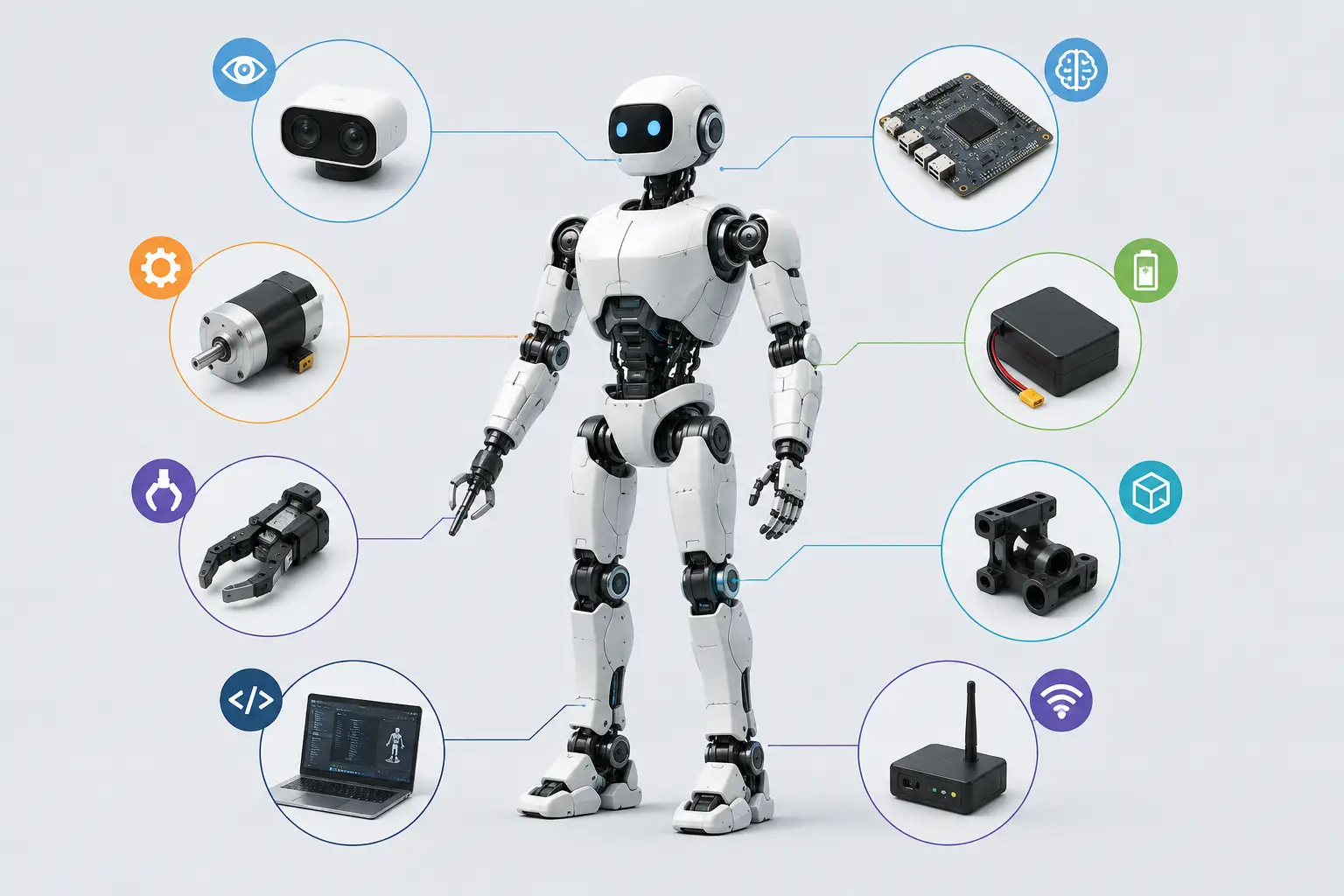
机器人的主要组成部分包括:
- 传感器
- 执行器
- 控制器
- 电源供应
- 机械结构
- 末端执行器
- 软件
- 通信系统
- AI或决策系统
一个简单的理解方式是:
传感器帮助机器人感知世界。
控制器帮助机器人处理信息。
执行器帮助机器人运动。
软件告诉机器人该做什么。
当这些部分协同工作时,机器人就能完成有用的任务。
1. 传感器
传感器帮助机器人理解周围正在发生什么。
你可以把传感器理解成机器人的眼睛、耳朵和皮肤。没有传感器,机器人就不知道自己在哪里、附近有什么,或者环境是否发生了变化。
例如,扫地机器人会用传感器识别墙壁、家具、楼梯和地面上的脏污区域。自动驾驶车辆会用摄像头、雷达和LiDAR理解道路环境。机械臂可能会用力传感器判断自己抓住物体的力度。
常见的机器人传感器包括:
- 摄像头
- LiDAR
- 超声波传感器
- 红外传感器
- 触觉传感器
- 力传感器
- 陀螺仪
- IMU
- 麦克风
- 温度传感器
不同机器人需要不同传感器。
无人机需要传感器来保持空中平衡。仓储机器人需要传感器来避开人和货架。医疗机器人可能需要非常精确的传感器来支持细微动作。
简而言之,传感器为机器人提供关于世界的信息。
2. 执行器
执行器是让机器人动起来的部件。
如果传感器像机器人的感官,那么执行器就像机器人的肌肉。它们把能量转化为运动。
当机器人转动车轮、移动手臂、打开夹爪、弯曲关节或旋转摄像头时,通常都离不开执行器。
最常见的执行器是电机。电机用于机械臂、移动机器人、无人机、人形机器人和许多其他系统。
常见执行器类型包括:
- 电机
- 伺服电机
- 步进电机
- 液压执行器
- 气动执行器
- 直线执行器
每种类型都有自己的用途。
电机很常见,因为它们灵活且易于控制。液压执行器能提供很大的力量,因此常用于重型机械。气动执行器使用压缩空气,常见于工厂自动化。
没有执行器,机器人能做的事情很有限。它也许可以“思考”或“看见”,但没有运动能力,就无法在物理世界中行动。
3. 控制器
控制器是机器人最重要的部分之一。
它接收传感器数据,处理这些数据,然后向执行器发送指令。简单来说,控制器帮助机器人决定下一步该做什么。
想象一个扫地机器人正在房间里移动。当传感器检测到墙壁时,控制器会收到这个信号,然后告诉电机减速、转向或换个方向移动。
控制器可以很简单,也可以很复杂。
小型机器人玩具可能只使用一个小型微控制器。工业机器人可能使用强大的控制单元。人形机器人可能同时使用多台计算机来控制平衡、视觉、运动和决策。
常见控制器类型包括:
- 微控制器
- 单板计算机
- 工业控制器
- 嵌入式系统
- 机器人控制单元
需要注意的是,控制器并不等同于AI。
许多机器人并不使用高级人工智能。它们可能只是按照工程师写好的规则运行。但即便如此,机器人仍然需要控制器来执行这些规则。
4. 电源供应
每个机器人都需要能量。
电源供应为传感器、控制器、电机、计算机和其他系统提供运行所需的能量。
有些机器人使用电池。有些机器人直接连接电源。有些特殊机器人可能使用燃料电池或其他能源系统。
常见电源形式包括:
- 电池
- 有线供电
- 充电底座
- 电源管理系统
- 特殊场景中的燃料电池
移动机器人通常需要电池,因为它们要四处移动。扫地机器人、无人机、仓储机器人和人形机器人都高度依赖电池性能。
工业机械臂通常固定在一个位置,因此可以直接接入电源。
电源不只是让机器人开机。它还会影响机器人能工作多久、有多重、移动多快,以及能输出多大力量。
这也是为什么续航时间是许多先进机器人,尤其是人形机器人和无人机面临的重要挑战。
5. 机械结构
机械结构就是机器人的身体。
它包括框架、关节、手臂、腿、车轮、齿轮、底盘和其他让机器人形成特定形态的物理部件。
机器人的结构取决于它被设计来做什么。
机械臂需要关节和连杆,才能朝不同方向运动。四足机器人需要腿和强大的平衡系统。无人机需要轻量框架和螺旋桨。仓储机器人需要稳定底座和车轮。
常见机械部件包括:
- 框架
- 关节
- 手臂
- 车轮
- 腿
- 齿轮
- 连杆
- 底盘
- 外壳
好的机械设计会让机器人更强、更安全,也更高效。
例如,工厂里的机器人可能需要坚固的金属结构,因为它要搬运重物。家用机器人需要更小、更安全的身体,因为它在人附近工作。人形机器人则需要一个能够同时支撑平衡、行走和手臂运动的身体。
机械结构不只是外观问题。它决定了机器人在物理上能做什么。
6. 末端执行器
末端执行器是机器人直接与外部世界互动的部分。
对于机械臂来说,末端执行器通常安装在手臂末端。它可以是夹爪、吸盘、焊接工具、切割工具,甚至是一只机械手。
你可以把末端执行器理解成机器人的手或工具。
常见末端执行器包括:
- 夹爪
- 吸盘
- 焊接工具
- 切割工具
- 钻头
- 喷涂器
- 手术工具
- 机械手
不同任务需要不同末端执行器。
仓储机器人可能用吸盘拿起箱子。工厂机器人可能用焊接工具处理汽车车身。手术机器人可能使用微型精密工具。人形机器人可能用机械手拿起日常物品。
末端执行器非常重要,因为它决定机器人如何触碰、抓取、移动或改变物体。
没有合适末端执行器的机械臂,就像一个人没有拿到合适工具。
7. 软件
软件让机器人真正变得有用。
硬件给机器人一个身体,而软件告诉机器人如何使用这个身体。
机器人软件可以控制运动、读取传感器数据、规划路径、避开障碍、识别物体,并与用户通信。
常见机器人软件包括:
- 运动控制软件
- 导航软件
- 计算机视觉软件
- 任务规划软件
- 安全软件
- 用户界面
- 机器人操作系统
例如,配送机器人需要软件来规划路线。机械臂需要软件来平稳、准确地移动。无人机需要软件来保持空中稳定。扫地机器人需要软件来绘制房间地图,并记住哪些区域已经清洁过。
许多机器人开发者会使用ROS这样的框架,也就是Robot Operating System。ROS并不完全像Windows或macOS那样是一个操作系统。它更像是一组工具,帮助开发者更快构建机器人软件。
对初学者来说,核心想法很简单:
软件是一组指令和逻辑,用来引导机器人的行为。
8. 通信系统
机器人经常需要发送和接收信息。
通信系统让机器人能够连接用户、计算机、云平台、其他机器人或工厂系统。
例如,扫地机器人可以通过Wi-Fi连接手机App。仓储机器人可能会与其他机器人共享位置信息。工业机器人可能会从工厂控制系统接收指令。
常见通信方式包括:
- Wi-Fi
- Bluetooth
- Ethernet
- 5G
- 工业网络
- 云连接
- 机器人之间通信
当许多机器人一起工作时,通信尤其重要。
在仓库中,几十台甚至几百台移动机器人可能同时移动。它们需要知道其他机器人在哪里、货物存放在哪里,以及接下来应该执行哪些任务。
没有通信,机器人仍然可以工作,但连接能力会弱很多,也更难管理。
9. AI和决策系统
不是每个机器人都需要AI。
这是一个常见误解。许多机器人即使没有高级人工智能,也能很好地工作。传统工业机器人可以高精度地重复同一个动作数千次,即使它并不像人类一样“理解”世界。
但AI在现代机器人中变得越来越重要。
AI可以帮助机器人识别物体、理解语音、从数据中学习、做出决策,并适应新环境。
与AI相关的机器人能力包括:
- 计算机视觉
- 物体识别
- 自然语言理解
- 机器学习
- 路径规划
- 决策
- 强化学习
例如,传统机器人可能只能从固定位置拿起一个物体。而AI驱动的机器人也许能在凌乱房间里找到这个物体,理解它是什么,并决定如何把它拿起来。
这对于人形机器人、家用机器人和服务机器人尤其重要,因为它们经常在并不完全受控的环境中工作。
工厂可以围绕机器人来设计,家庭却不能。
这也是AI对下一代机器人如此重要的原因之一。
机器人组件如何协同工作
机器人组件不是单独工作的。它们作为一个系统一起运行。
我们用扫地机器人举一个简单例子。
传感器检测墙壁、家具和开阔空间。控制器处理这些信息。软件规划清洁路径。电机驱动车轮。电池提供电力。通信系统把机器人连接到手机App。
所有这些部分一起完成一个简单任务:清洁地板。
再想想工厂里的机械臂。
传感器可能检测物体的位置。控制器计算手臂应该如何移动。执行器带动每个关节。末端执行器抓住物体或使用工具处理物体。软件控制时机、速度和安全。
这就是为什么理解机器人时,最好把它看作一个完整系统,而不是一堆零件的集合。
如果一个部分失效,整个机器人都可能无法正常工作。
一个简单的人体类比
理解机器人组成部分的一个简单方式,是把它们和人体做比较。
| 机器人组件 | 类似人体部分 | 主要功能 |
|---|---|---|
| 传感器 | 眼睛、耳朵、皮肤 | 感知环境 |
| 控制器 | 大脑 | 处理信息 |
| 执行器 | 肌肉 | 产生运动 |
| 电源供应 | 能量来源 | 提供电力 |
| 机械结构 | 骨骼 | 支撑身体 |
| 末端执行器 | 手或工具 | 与物体互动 |
| 软件 | 指令和记忆 | 引导行为 |
| 通信系统 | 语言和信号 | 发送和接收信息 |
| AI系统 | 学习和决策 | 适应新情况 |
这个类比并不完美,但对初学者很有帮助。
机器人需要身体、感官、运动、能量和指令。更先进的机器人还需要学习和决策能力。
FAQ
机器人最重要的组成部分是什么?
没有单一的“最重要”部件。机器人是一个系统,因此传感器、控制器、执行器、电源、软件和机械部件都很重要。
不过,传感器、控制器和执行器通常被认为是核心部分,因为它们让机器人能够感知、处理和行动。
所有机器人都需要传感器吗?
大多数现代机器人都会使用传感器,但不是每个机器人都需要高级传感器。
一些简单机器可以在几乎不感知环境的情况下执行固定指令。不过,在变化环境中工作的机器人通常需要传感器,才能安全、有效地运行。
机器人必须使用AI吗?
不,所有机器人并不都需要AI。
许多工业机器人只是按照编程指令运行。即使不使用高级AI,它们也非常有用。不过,在需要理解图像、语言、物体或不可预测环境的机器人中,AI正变得越来越常见。
哪个部件让机器人运动?
执行器让机器人运动。
电机是最常见的执行器。它们可以驱动车轮、关节、手臂、夹爪和许多其他机器人部件。
控制器和软件有什么区别?
控制器是处理信息并发送指令的硬件。
软件是告诉控制器该做什么的程序或逻辑。
简单来说:控制器运行指令,软件提供指令。
机械臂由什么组成?
机械臂通常包括关节、连杆、电机、传感器、控制器和末端执行器。
关节和连杆构成手臂结构。电机驱动手臂。传感器提供反馈。控制器和软件决定手臂如何移动。末端执行器执行实际任务,例如抓取、焊接或切割。
结论
机器人看起来可能差别很大,但大多数机器人都由相同类型的基础组件构成。
传感器帮助机器人理解世界。执行器帮助机器人运动。控制器和软件帮助机器人处理信息并执行指令。机械结构给机器人身体。电源供应提供能量。末端执行器让机器人与物体互动。通信系统帮助机器人连接人和其他机器。
AI并不是每个机器人都必需的,但随着机器人从受控工厂环境走向家庭、医院、仓库和公共空间,AI正变得越来越重要。
理解这些基础组成部分后,你会更容易理解不同类型的机器人,从工业机械臂、扫地机器人,到无人机和人形机器人。